Robot for Semiconductor
STCR4160SN (For thin wafer or wafer-edge hold)4-Axis Cylindrical Coordinate Clean Robot
|
Usage Environment/SpecificationsProduct Profile
|
List of Product Model
| Product Model & Vertical Stroke | |||
|---|---|---|---|
| STCR4160SN-200-PM | 200mm | ||
| STCR4160SN-300-PM | 300mm | ||
| STCR4160SN-400-PM | 400mm | ||
| STCR4160SN-450-PM | 450mm | ||
| STCR4160SN-500-PM | 500mm | ||
Product Video
- The image above and the video are of STCR4160SN-300-PM.
Characteristics
For handling thin wafer or wafer-edge hold with low-cost, high-speed handling, and no step-out error
- High reliability: Stepping motor installed, but no step-out by JEL unique control.
- High rigidity: payload capacity of 3kg (calculated for the arm 3rd joint/including wrist-block, end-effector and wafer)
- Base or flange mounting type is selectable.
Standard Specifications
| Specifications of Robot | ||||
|---|---|---|---|---|
| Robot Model | STCR4160SN-300-PM | |||
| Wrist-Brock | SART09362 | End-Effector | Upper end-effector: 3D-09371 Lower end-effector: 3D-09370 |
|
| Carrying Object | Up to 300mm silicon wafer | |||
| Wafer Holding Method | Upper end-effector: By vacuum suction (wafer edge) Lower end-effector: By Cyclone pad suction and friction generated by friction rubber (Various materials are available for contact parts.) |
|||
| Robot Model Type | Cylindrical coordinate type | Control Axis | 4-axis | |
| Motor Type | 2-phase pulse motors installed in all axes. | |||
| Operating Range | From the robot center to the wafer center | Rotation Angle (Theta-axis) | Vertical Stroke (Z-axis) | |
| 625mm | 340deg | 300mm | ||
| Carrying Speed (Ave.) | Arm (R-axis) | Rotation Angle (Theta-axis) | Vertical Stroke (Z-axis) | |
| 400mm/sec | 180deg/sec | 200mm/sec | ||
| Carrying Speed (Max.) | Arm (R-axis) | Rotation Angle (Theta-axis) | Vertical Stroke (Z-axis) | |
| 800mm/sec | 220deg/sec | 250mm/sec | ||
| Repeatability | Within ±0.1mm | |||
| Cleanliness | ISO Class 2 (at wafer transfer level when exhausting driving part) | |||
| Utility | Power: DC24V±10% 16A Clean air: 60 SLM or more, 0.1 to 0.3 MPa Vacuum: -53kPa or more |
|||
| Mass | Approx. 30kg (Robot) | |||
| Specifications of Controller | ||||
| Controller Model | C4000 series | |||
| Interface | RS232C and parallel photo I/O | |||
| Outline Drawing (Standard) |
|---|
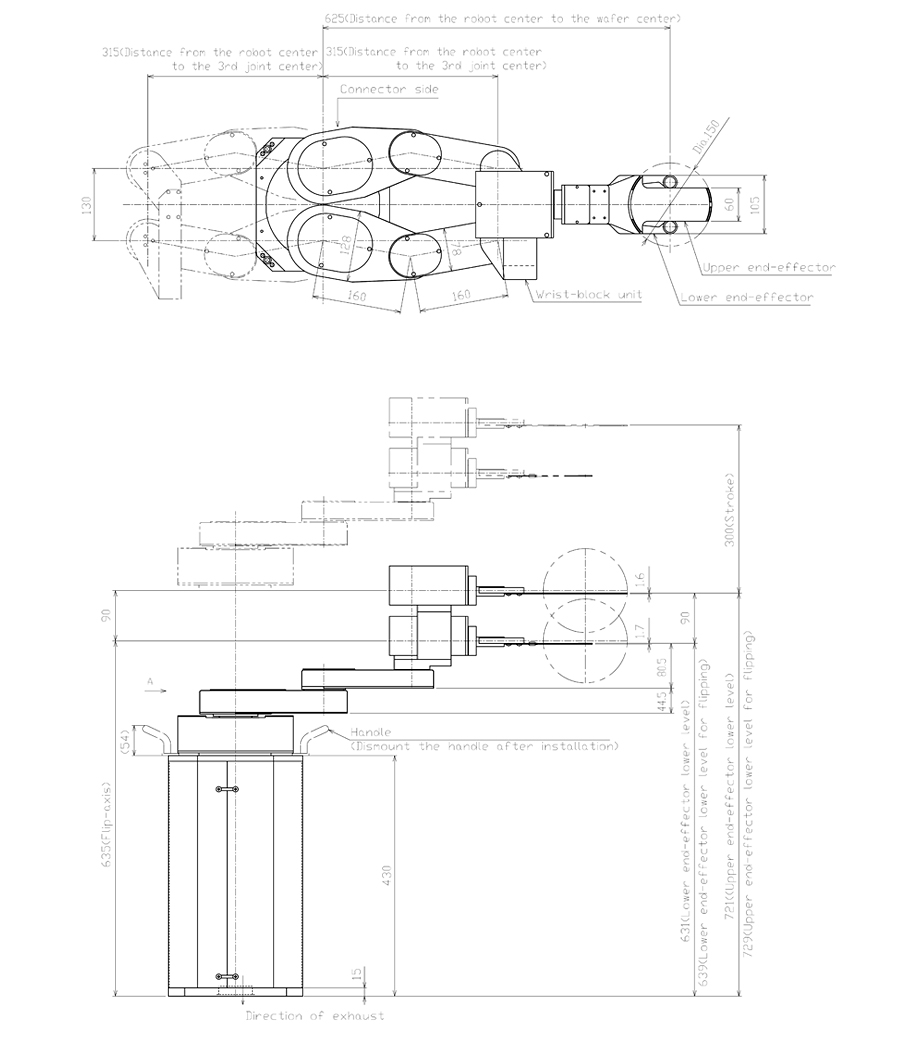
|
Option
Other Option
Icon guide
- ...Atmosphere
- ...Vacuum
- ...Waterproof
- ...Single arm
- ...Twin arm
- ...Thin wafer
- ...CE marking
- ...JEL's standard spec.
- ...KCs marking