Robot for Petri Dish/Microplate
Robot for Handling Petri Dish
|
Usage Environment/SpecificationsProduct Profile
|
List of Product Model
| Product Model & Vertical Stroke | |||
|---|---|---|---|
| GCR4210-300-AM | 300mm | ||
Product Video
- The image and the video are of Robot for handling petri dish (GCR4210-300-AM)
Characteristics
- Suitable for handling in sterile room, or clean environment used for medical and biotechnology applications.
- Microplate handling is also available.
- Tilt feature tilts the petri dish to aspirate the culture fluid.
- Transferring parts can be installed in our robots. (The specifications below are based on horizontal and multi-joint type clean robot.)
Standard Specifications
| Specifications of Robot | |||
|---|---|---|---|
| Robot Model | GCR4210-300-AM | ||
| Carrying Object | Petri dish (Glass) φ90mm x 21mm (*Other sizes or microplate is available.) | ||
| Petri Dish Holding | By edge grip (Edge grip by driving pneumatic cylinder) | ||
| Robot Model Type | Horizontal and multi-joint type | Control Axis | 4-axis |
| Motor Type | AC servo motor | ||
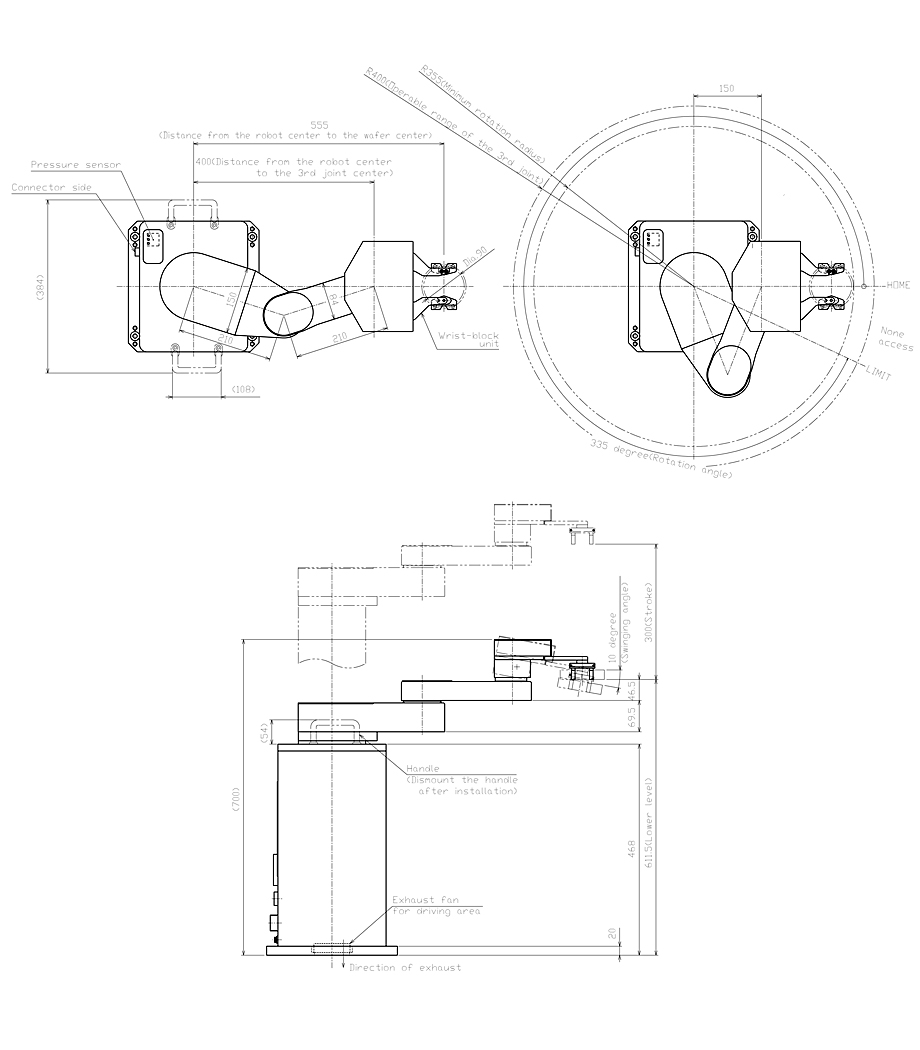
| Operating Range | 3rd Joint Center | Rotation Angle (Theta-axis) | Vertical Stroke (Z-axis) |
| 400mm | 335deg | 300mm | |
| Carrying Speed (Ave.) | Arm (R-axis) | Rotation Angle (Theta-axis) | Vertical Stroke (Z-axis) |
| 165mm/sec | 165deg/sec | 150mm/sec | |
| Repeatability | Within ±0.1mm | ||
| Cleanliness | ISO Class 2 (at wafer transfer level when exhausting driving part) | ||
| Utility | Air: For driving edge grip (0.15MPa or more); For swinging wrist-block (0.3MPa or more) | ||
| Mass | Robot main body: Approximately 37kg | ||
| Specifications of Controller | |||
| Controller Model | C5000S series | ||
| Interface | RS232C and parallel photo I/O | ||
| Outline Drawing (Standard) |
|---|
|
Icon guide
- ...Atmosphere
- ...Vacuum
- ...Waterproof
- ...Thin wafer
- ...CE marking
- ...JEL's standard spec.
- ...KCs marking